How to map land cover fractions with synthetically mixed training data
This tutorial demonstrates a workflow that uses a series of submodules of the FORCE Higher Level Processing system (HLPS) to map sub-pixel fractions of land cover with Sentinel-2 imagery.
While spectral unmixing has been used for decades in different contexts, with different sensor types and different methods, this tutorial walks through a regression-based approach using synthetically mixed training data as presented in Okujeni et al. (2013).
The workflow in this tutorial uses a series of submodules of the FORCE Higher Level Processing system (HLPS) to map sub-pixel fractions of land cover with Sentinel-2 imagery and synthetically mixed training data.
Some of these submodules have been described in other places of the FORCE documentation, and entire tutorials have been dedicated to others (respective links will be given where applicable).
This tutorial illustrates the potential of FORCE to be used along the complete image processing chain, from downloading and pre-processing image acquisitions to producing meaningful spatial data. Its chapters correspond to the seven steps (and two optional steps) of the following workflow.
This workflow is reproducible, as all commands, parameter files and intermediate data will be provided. Parameter files will be directly available for download throughout the workflow, while intermediate data will only be available in a data repository due to file size (Download data from Zenodo, doi: 10.5281/zenodo.7529763)
This workflow can be used for image classification applications as well as regression-based mapping with any other kind of suitable training data making a few adaptations to the example parameter files. You might be able to skip chapters on data aggregation, sampling, or synthethic training data genereation depending on your desired input data and processing method.
Please note that FORCE parameter files require absolute file paths. This is why path names in the provided parameter files are placeholders and should be adapted according to your folder structure when you would like to replicate the workflow yourself. Also note that most parameter files have parameters for the number of threads to be used for parallel processing. Please adapt the number of threads according to the maximum number of threads available in your machine.
This workflow requires spatially explicit Earth Observation raster data to start with. It will technically work with any multi- or hyperspectral image data. This tutorial has been created with spectral-temporal metrics aggregated from all clear-sky Sentinel-2 observations in 2018 over Berlin, Germany (MGRS Tile 33UUU).
We first download all image acquisitions with less than 70% cloud cover according to the metadata catalogue using FORCE Level 1 Cloud Storage Downloader:
We do not provide these data in the downloadable data because of file size, and as they can be downloaded again anytime using the above command.
Tip
Please refer to the Level 1 Cloud Storage Downloader Documentation and Tutorial to know more about Sentinel-2 data downloads and about retrieving and updating the metadata catalogue required to download raw image data.
FORCE provides all functionalities to convert all downloaded Level 1 data (i.e., radiometrically calibrated and georectified) into Analysis-Ready Data (ARD), or Level 2 data. ARD are data that are readily usable for any application without much further processing. In FORCE, this includes
cloud and cloud shadow detection,
radiometric, atmospheric, and topographic correction,
BRDF correction,
resolution merging (from 20m bands to 10m, Sentinel-2 only).
You can access the parameter file here or use the one provided in the data repository.
It is highly recommended to use a Digital Elevation Model (DEM) for topographic correction purposes. We here use a global SRTM/ASTER composite that we cannot provide for download due to file sizes. However, you can use any DEM of your choice here, for example the one provided for Europe by the Copernicus Land Monitoring Service, or the global Copernicu DEM. The use of a DEM is, however, not required to continue data processing, and as our example region is rather flat, the impact of missing topographic correction might be acceptable. Please refer to this tutorial for more information about making use of a DEM in FORCE.
FILE_DEM=/path/to/dem/dem.vrt
As we want to subsequently use the ARD generated here in different higher-level submodules, we organize data in a data cube and in image tiles. We defined tiles to be 30x30km in size, so considerably smaller than MGRS tiles. The data cube parameters can be defined in the Level 2 parameter file. We use ETRS89-extended/LAEA Europe projection (EPSG: 3035). The following aspects of the workflow will be limited to a single image tile for reasons of simplicity.
Please refer to the Level 2 ARD tutorial for further information about generating ARD in FORCE, and to the Digital Elevation Model tutorial for information on how to prepare a DEM for the FORCE processing system.
Info
FORCE is also able to co-register Sentinel-2 data with Landsat time series data (Tutorial). However, this workflow does not make use of this because it uniquely relies on Sentinel-2 data.
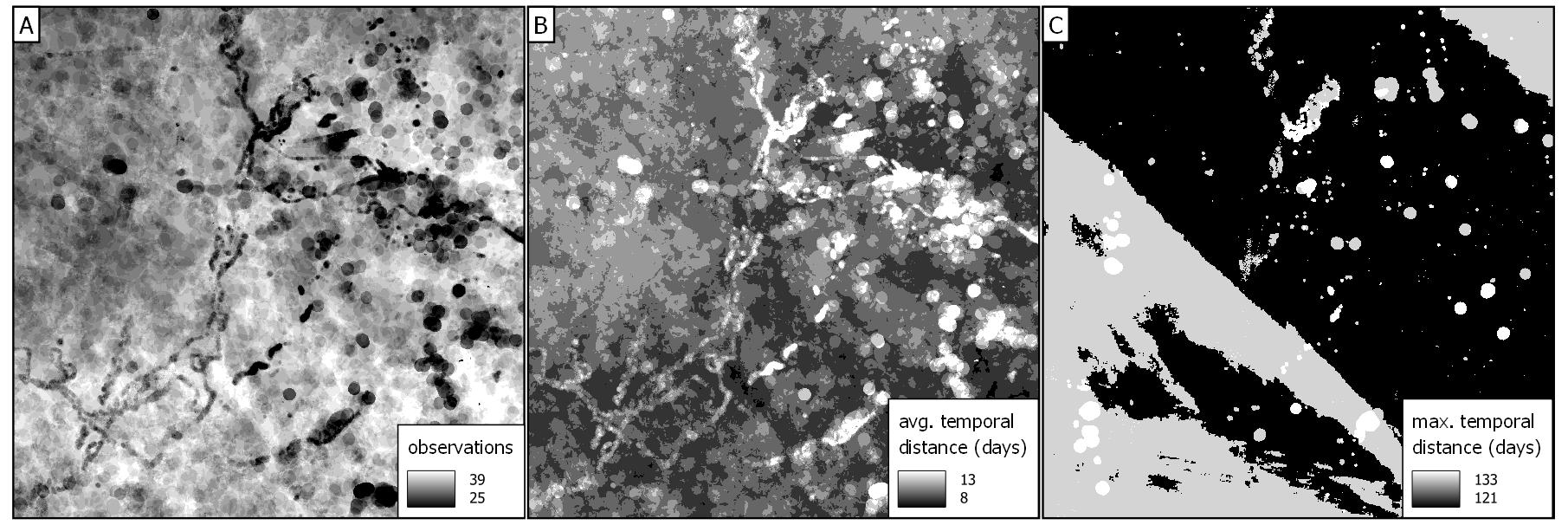
At this point of the workflow, we can optionally check Clear-Sky Observation (CSO) statistics for our data. Data availability in our study area and period will have a great impact on the quality of derived aggregated data, i.e., spectral-temporal metrics, and, ultimately, on land cover fraction mapping results. CSO statistics can be derived using the FORCE HLPS:
force-higher-levelparameterfiles/11_lcf_cso.prm
We compute two CSO statistics, the number of observations and the maximum temporal difference between observations, for the complete study period, as both are good, but simple indicators for data quantity and distribution.
CSO=NUMAVGMAX
You can access the parameter file here or use the one provided in the data repository.
Based on CSO statistics, we assume that in most places of our study area, the number of observations (range from 10 to 42) and their temporal distance seems sufficient for generating robust spectral-temporal metrics.
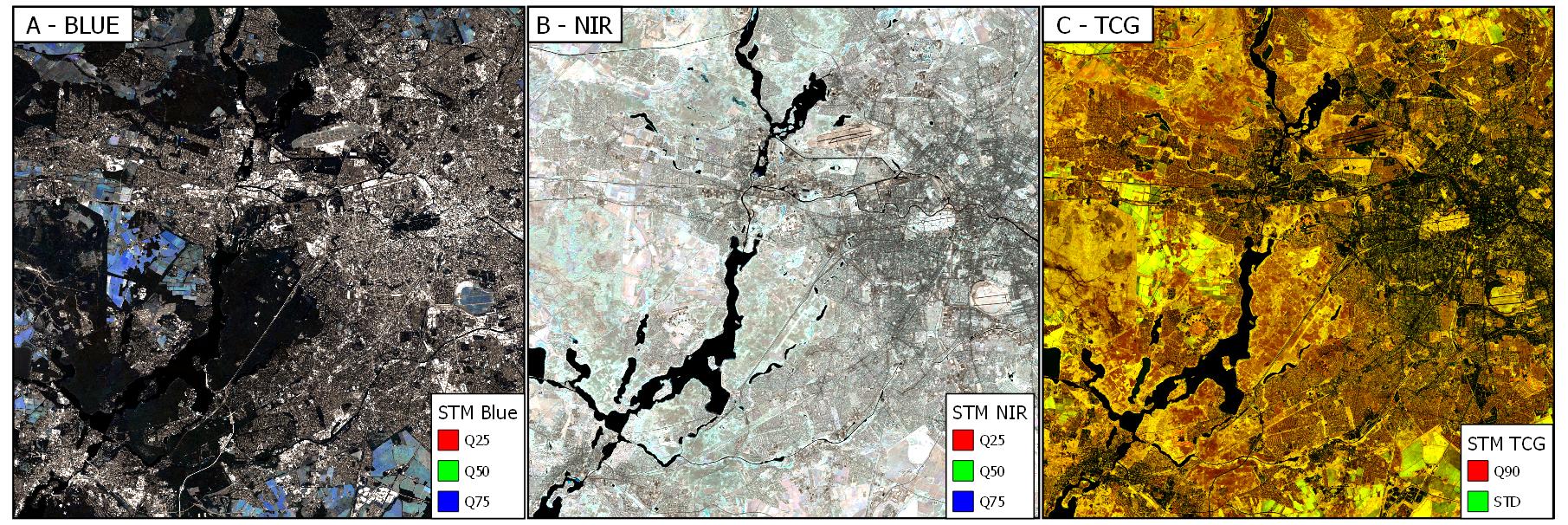
Previous research showed that sub-pixel fraction mapping of land cover with synthetically mixed training data can be performed using spectral-temporal metrics (STM) as input data.
Spectral-temporal metrics are band-wise descriptive statistics, which summarize image reflectance (or an index derived thereof) of all valid observations within a defined time period, such as mean reflectance. They can be computed using the FORCE TSA submodule (Tutorial).
Compared to single observations, spectral-temporal metrics are able to increase model robustness across large areas as differences in acquisition dates across orbits has lower effects on the data. Spectral-temporal metrics are, in addition, able to represent phenological variation.
In this tutorial, we use the first, second, and third quartile of reflectance of all clear-sky Sentinel-2 observations within our study period, as well as the 90th quantile and the standard deviation of two indicators of vegetation, Tasseled Cap Greenness and Normalized Difference Vegetation Index (NDVI).
Spectral-temporal metrics of reflectance and vegetation indices (34 features) used in this example workflow.
Band
Spectral-Temporal Metrics
Blue
Q25, Q50, Q75
Green
Q25, Q50, Q75
Red
Q25, Q50, Q75
Red Edge 1
Q25, Q50, Q75
Red Edge 2
Q25, Q50, Q75
Red Edge 3
Q25, Q50, Q75
Broad NIR
Q25, Q50, Q75
NIR
Q25, Q50, Q75
SWIR 1
Q25, Q50, Q75
SWIR 2
Q25, Q50, Q75
Tass. Cap Green.
Q90, STD
NDVI
Q90, STD
The selection of these features was shown to result in accurate land cover fraction maps in previous studies (e.g., Schug et al. (2020)). It is, however, possible that mapping land cover fractions in world regions with different phenological regimes or land cover characteristics might require different feature combinations.
Please refer to the Spectral Temporal Metrics tutorial for further information about generating spectral-temporal metrics using the Time Series Analysis (TSA) submodule of the FORCE Higher Level Processing system (HLPS). Here, the concept of spectral-temporal metrics is explained and illustrated.
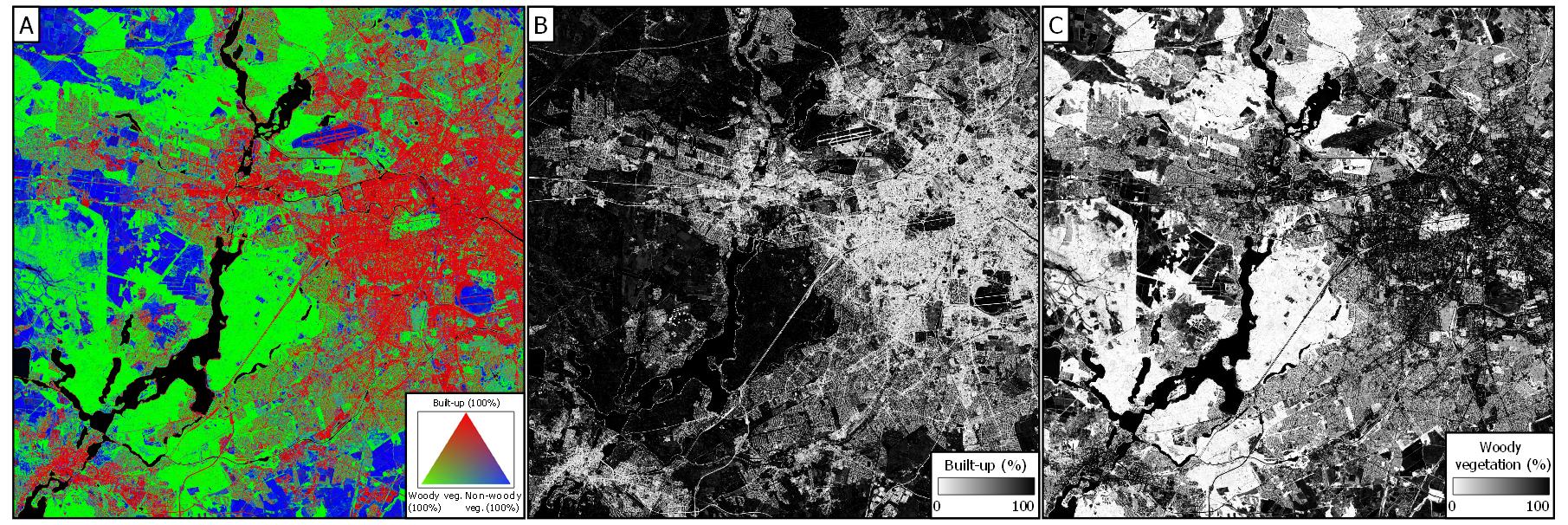
Land cover fraction mapping with synthetically mixed training data requires spectral information from pure land cover surfaces to begin with, i.e., spectral reference data that can eventually be used to train a model that understands inter- and intra-class spectral variability.
Here, we are using reference information directly from the imagery (as opposed to, e.g., data from external spectral libraries or ground sampling). We identified 388 reference surfaces, i.e., pixels of 10x10 m that cover only a single land cover type, for five classes: Built-up surfaces (182 reference points), woody vegetation (70), non-woody vegetation (98), bare soil (15), and water (23).
The number of reference points per class varies based on spectral intra-class variability (which is, e.g., higher for non-woody vegetation than for woody vegetation) and surface availability (e.g., few available reference points for bare soil).
Info
In this tutorial we focus on a single 30x30km image tile. However, we also want the example to be reproducible, which means that all reference points were sampled within that tile. There is a chance that this will produce a highly local model not well transferable to other (even closer) regions. This is fine for illustration purposes, but using this approach for larger area mapping, make sure that reference data is representative of the whole area.
You can download these reference points as a text file here, or as a shape file from this dataset on Zenodo. The data come in a WGS84 projection (EPSG: 4326) and are resampled on-the-fly when used with data from the data cube.
to extract spectral information from spectral-temporal metrics at the locations given. You can access the parameter file here or use the one provided in the data repository.
In the parameter file, we will need to provide a list of features that the spectral information will be drawn from. These files and bands correspond to the spectral-temporal metrics previously created:
The Sampling submodule will produce four individual text files that contain feature and response information as well as a list of coordinates of the reference points.
The approach used in this tutorial is described in Okujeni et al. 2013, who compared it to results generated with multiple endmember spectral mixture analysis (MESMA). Please refer to the literature (e.g., Quintano et al. 2012) for a more encompassing overview over spectral unmixing techniques, as they will not be a subject of this tutorial.
Regression-based spectral unmixing for land cover fraction mapping requires reference information about fractional land cover. This can be achieved, for example, by digitizing surface area types within a given pixel and use resulting fractional reference cover as input to regression model training. While this approach is very accurate, it is also time and labour intensive.
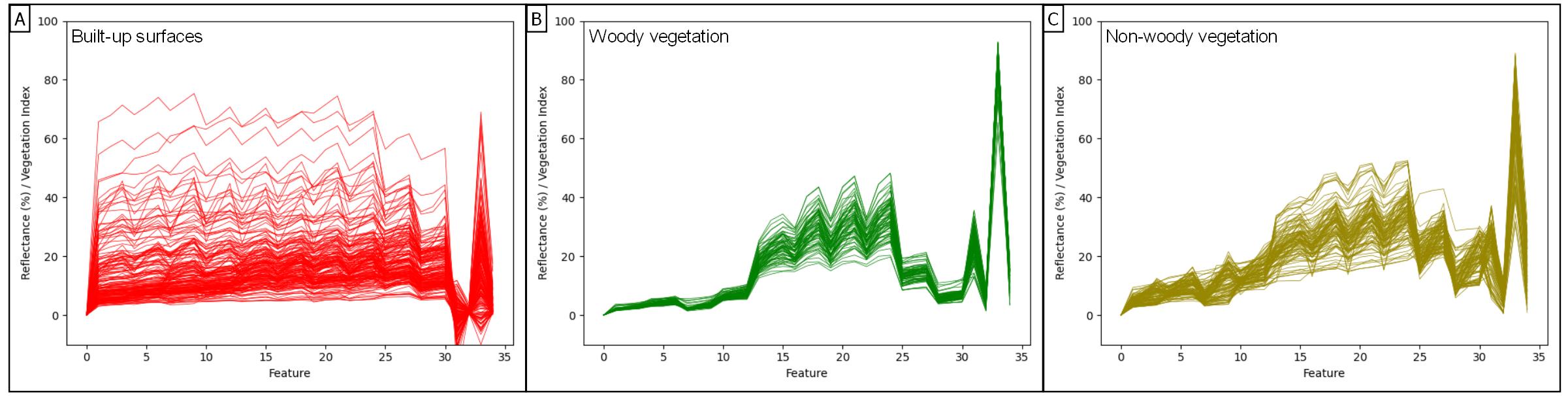
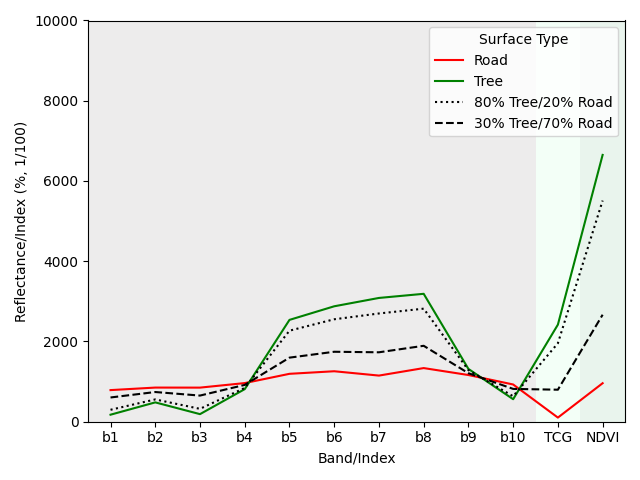
We here use synthetically generated fractional reference data for regression model training. These synthetically mixed data are based on known spectral information that represent pure surface types. For example, when we know what both a tree-covered surface and a road-covered surface spectrally look like in a Sentinel-2 image , we theoretically know what any kind of linear mixture between both surface look like, e.g., a pixel with 80% tree cover and 20% road cover, or a pixel with 30% tree cover and 70% road cover.
(For informations about Sentinel-2 spectral bands, see Spatial Resolution)
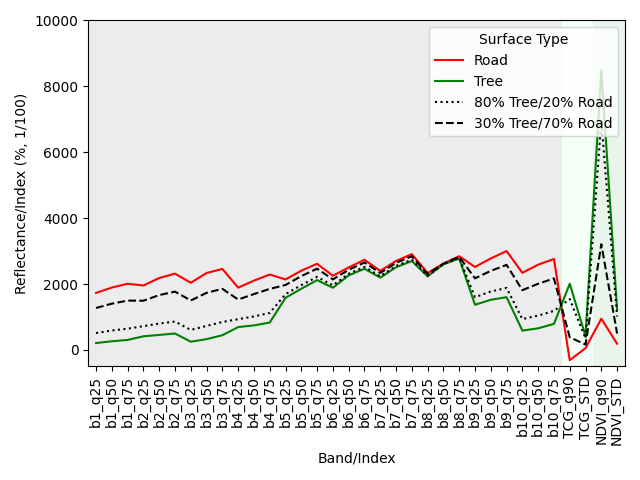
This concept is, of course, transferable to our case, where we use spectral-temporal metrics instead of single observations. Please not that the number of features increases from 12 to 34, while the idea is the same. In this following case, the synthetic mixtures produce training data for 80% and 30% tree-covered surfaces, as well as 100% and 0% tree-covered surfaces.
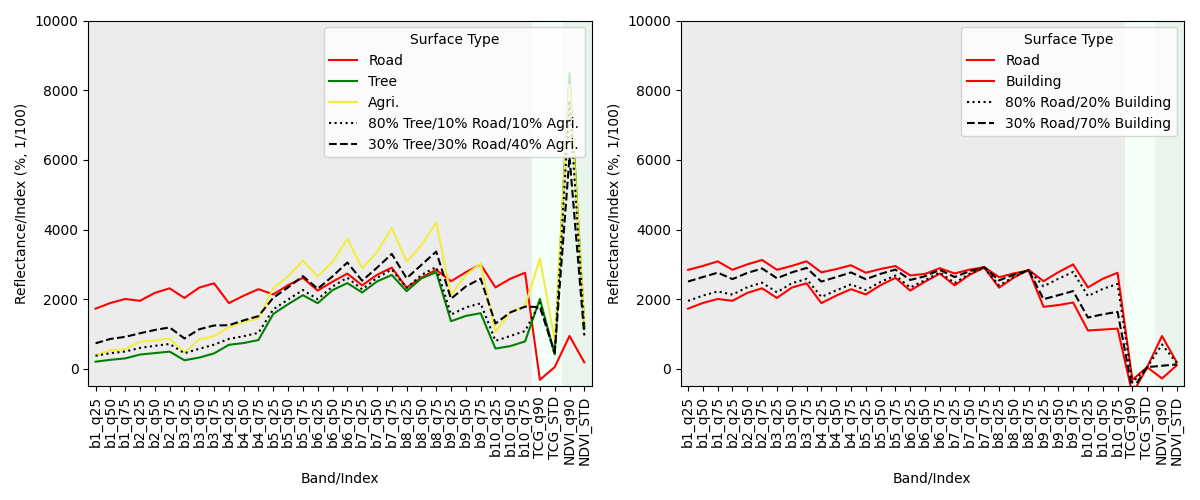
This idea can be expanded to further combinations of three or more surface types, as well as to different surfaces of the same surface type when intra-class spectral variability is high. In this following case, we produce training data for 80% and 30% tree-covered surfaces (left), as well as 80% and 30% built-up area (right). In the second case, we mix spectral-temporal metrics from two pure surface types of the same target class (built-up), but from spectrally different surfaces, i.e., a road and a rooftop.
In principle, an indefinite number of training data can be synthetically created this way. However, note that the sampled pure reference surfaces still need to represent the variety of surface types and characteristics of the respective target classes. Also, the more training data we want to create, the more pure reference spectra we need in order to not repeat known synthetic mixtures.
We call the synthetic training data generation using
force-synthmixparameterfiles/40_lcf_synthmix.prm
You can access the parameter file here or use the one provided in the data repository.
The parameter file offers some customization of the synthetic mixing procedure. The default settings have been refined over the years, but feel free to experiment with some of them, as they might each affect model outcomes. A more detailed description of the mixing process can be found in Cooper et al. (2020)
Here, we generate a total number of 1,000 synthetic mixtures per target class at random mixing ratios. Additionally, all feature sets from pure surfaces are included as a 100%/0% reference. We use a maximum mixing complexity of three classes with most mixtures being two-class mixtures (50%). We also allow within-class mixing as described above.
We use three target classes: Built-up surfaces, woody vegetation and non-woody vegetation. Water and bare soil are uniquely used as background classes. This means that their spectral information is used as a counterpart during synthetic mixing, but no training data will be generated for them. Hence, no fraction models will be trained and no land cover fraction will be predicted for them. This is because the number of reference points for pure water and bare soil surfaces in our study area is rather low (23 and 15) compared to other classes (see Sampling section).
TARGET_CLASS=123
We generate five separate synthetically mixed training datasets for each of the three target classes (i.e., 15 training datasets). This means that for each target class, we can train up to five regression models, and use up to five predicitions per pixel and target class. This approach is referred to as an ensemble approach in Okujeni et al. (2017) and has been shown to provide higher prediction robustness. Continue reading through the following sections to know how this workflow deals with multiple target class models throughout the process.
ITERATIONS=5
Tip
Take a look at this tutorial, where concepts of regression-based unmixing of urban land cover were described and illustrated using the EnMAP Box and hyperspectral imagery.
to compare every set of synthetically mixed training data to every pixel in the image data (access the parameter file here). The image features given in the parameter file have to correspond to the features used during sampling and have to be in the same order.
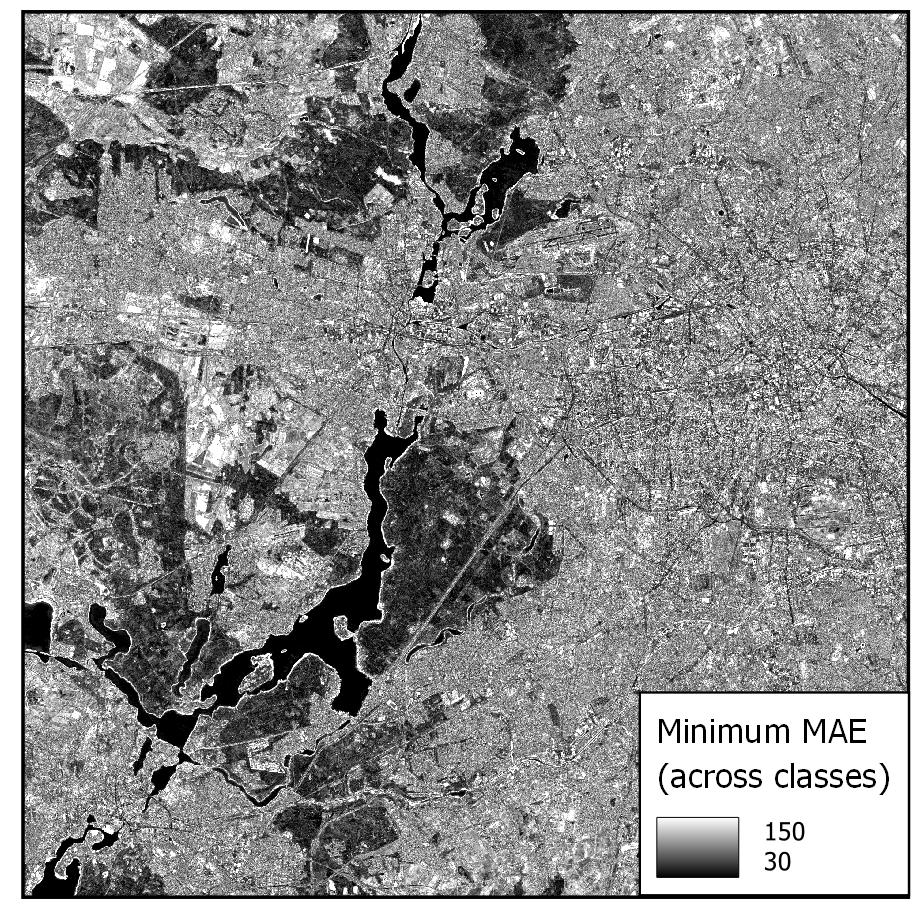
Library completeness is measured using the Mean Absolute Error (MAE) across all features. The submodule provides the lowest MAE between each training feature set (here: 1,000) and each pixel, both per target class and overall.
Library completeness is not an established way to assess the quality of our training data library. However, it is a rough, but good indicator to show what surface types in the image might be under-represented in our training data, and, thus, in our reference points. In our example, we see that our training data represents forests really well (low values, dark areas). It seems like our training data does not as well represent some agricultural areas in the western part of our scene (higher values, brighter areas). Still, the maximum of our minimum MAE values in the image is ca. 150, which we consider low knowing that reflectance values can range from 0 to 10,000. Based on this, we do not see the necessity to identify further reference points.
Info
Note that low MAE values do not necessarily mean that the image pixels are correctly represented in the library. For example, in the case of spectral similarity of two different surface types, this algorithm cannot distinguish between correct and incorrect but similar spectral class representation.
We use force-train with synthetically created training data to train regression-based machine learning models of land cover fraction.
For each set of synthetically mixed training data and for each class, we will need to train one model, which means that we need to create one individual training parameter file for each case. This sums up to 15 parameter files, as we use three target classes and five iterations.
As we do not want to manually create 15 parameter files, force-magic-parameter will help with this. We create one reference parameter file that contains all the information that is identical in each individual parameter file, as well as two vectors holding replacement values for classes (SET) and iterations (IT) at the very beginning of the file:
%SET%:001002003
%IT%:001002003004005
In the following, we use SET and IT as a placeholder for classes and iterations:
The machine learning submodule of FORCE allows us to provide multiple models per class to generate a single land cover fraction prediction. Remember that in previous steps, we generated five sets of synthetically mixed training data, and equally created five models per target class.
In the parameter file, models can be referred to lines and columns. One line corresponds to one target class (i.e., one band in the model output file). Per line, an undefined number of models can be provided. For each model, this submodule will create one prediction. When using regression-based prediction, the results of all predictions will be averaged to generate the final land cover fraction output.
Please be aware that more models per target class go along with higher computing time. By setting
ML_CONVERGENCE=0.025
in the parameter file, FORCE, however, helps us to reduce computing time as far as possible. This parameter only applies if multiple models are given for a modelset, and if the machine learning method is regression. This parameter sets a convergence threshold, knowing that with an increasing number of models, the averaged predicted values will converge. If the predictions differ less than this value after adding another model, no more model will be predicted (tested on a pixel level). The threshold should be adapted based on the application.
Be aware that training response values for fractions after synthetic mixing range from 0 to 1. As FORCE will not save floating-point numbers, we set a scaling factor of 10,000 in order to obtain values between 0 and 10,000 in 16bit signed integer files.
ML_SCALE=10000
We can optionally set
OUTPUT_MLI=TRUE
OUTPUT_MLU=TRUE
which outputs the number of models used when applying a convergence threshold (as we did) and the uncertainty of the averaged prediction, i.e., the standard deviation of all predictions blended into the final output file.